Mars Science Laboratory: Curiosity Rover
Part of NASA's Mars Science Laboratory mission, at the time of launch, Curiosity was the largest and most capable rover ever sent to Mars at that time.

Meet Curiosity
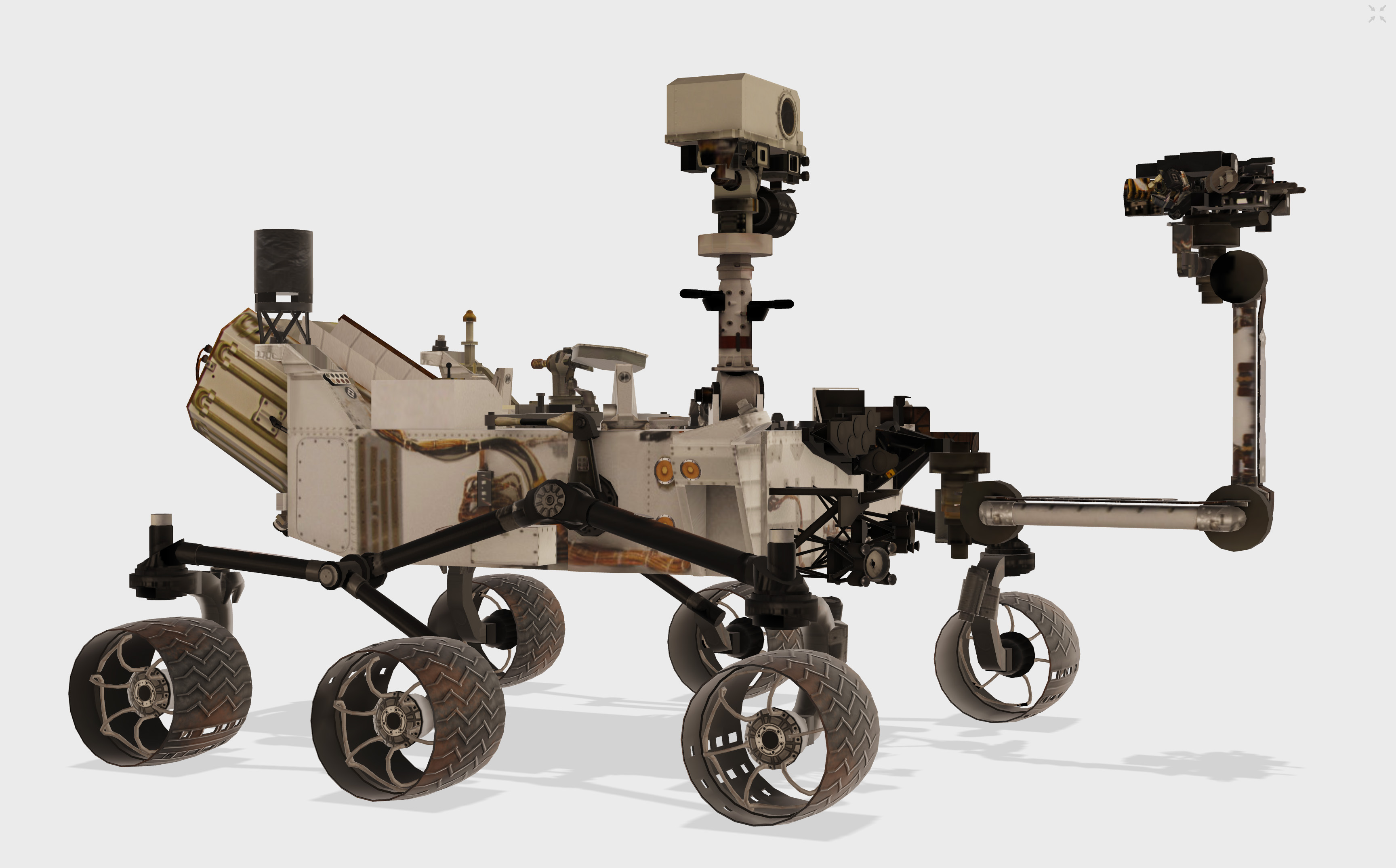
Size
About the size of a small SUV — 10 feet long, 9 feet wide and 7 feet tall), not including the arm.
Arm reach
About 7 feet (2.2 meters)
Mass/weight
1,982 lbs (899 kilograms) on Earth gravity; 743 lbs in Mars gravity (899 kilograms)

Features
Geology lab, rocker-bogie suspension, rock-vaporizing laser and lots of cameras
Landing Site: Gale Crater
Curiosity explores Gale Crater and acquires rock, soil, and air samples for onboard analysis. The car-size rover is about as tall as a basketball player and uses a 7 foot-long arm to place tools close to rocks selected for study. Curiosity's large size allows it to carry an advanced kit of 10 science instruments. It has tools including 17 cameras, a laser to vaporize and study small pinpoint spots of rocks at a distance, and a drill to collect powdered rock samples. It hunts for special rocks that formed in water and/or have signs of organics.
The Curiosity rover has taught us a lot about the history of Mars and its potential to support life. Take a tour of its landing site, Gale Crater. Credit NASA/JPL-Caltech












