Mars
Mars is the fourth planet from the Sun, and the seventh largest. It’s the only planet we know of inhabited entirely by robots.
All About Mars
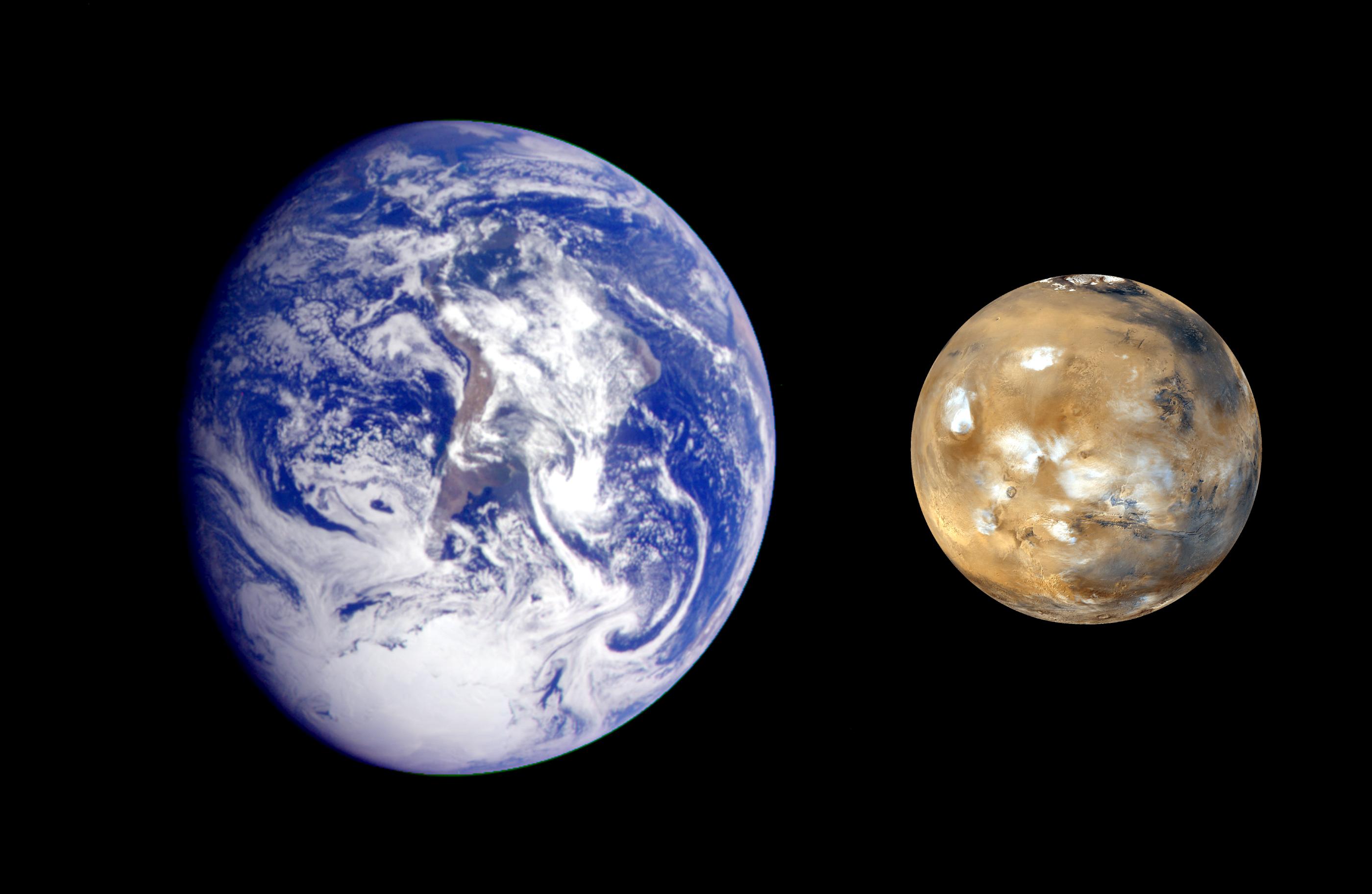
Small World
Mars is 53% smaller than Earth.

Fourth Rock
Mars is 1.52 AU from the Sun. Earth = 1.

More Time
A Martian day is a little longer than Earth's; a Mars year is almost two Earth years.

Rocky Planet
Mars' surface has been altered by volcanoes, impacts, winds, and crustal movement.

Bring a Spacesuit
Mars' atmosphere is mostly carbon dioxide, argon, and nitrogen.

Two Moons
Phobos and Deimos are small compared to the planet.

Ringless
Mars has no rings.

Many Missions
The first success was NASA's Mariner 4 flyby in 1965,

The Search for Life
Missions are determining Mars' past and future potential for life.

The Red Planet
Iron minerals in the Martian soil oxidize, or rust, causing the soil and atmosphere to look red.
Mars Overview
Mars is no place for the faint-hearted. It’s dry, rocky, and bitter cold. The fourth planet from the Sun, Mars, is one of Earth's two closest planetary neighbors (Venus is the other). Mars is one of the easiest planets to spot in the night sky – it looks like a bright red point of light.
Despite being inhospitable to humans, robotic explorers – like NASA's Perseverance rover – are serving as pathfinders to eventually get humans to the surface of the Red Planet.
Why Do We Go?
Mars is one of the most explored bodies in our solar system, and it's the only planet where we've sent rovers to explore the alien landscape. NASA missions have found lots of evidence that Mars was much wetter and warmer, with a thicker atmosphere, billions of years ago.
Explore with Us
Eyes on the Solar System
How We Explore








Beyond the Moon
Humans to Mars
Like the Moon, Mars is a rich destination for scientific discovery and a driver of technologies that will enable humans to travel and explore far from Earth.
Mars remains our horizon goal for human exploration because it is one of the only other places we know in the solar system where life may have existed. What we learn about the Red Planet will tell us more about our Earth’s past and future, and may help answer whether life exists beyond our home planet.
Learn More