
















Perseverance Rover Updates
These updates are provided by self-selected Mars 2020 mission team members who love to share what Perseverance is doing with the public. Dates of planned rover activities described in these blogs are subject to change due to a variety of factors related to the Martian environment, communication relays and rover status.
Written by Roger Wiens, Principal Investigator, SuperCam instrument / Co-Investigator, SHERLOC instrument at Purdue University Recently Mars has had a few Earthly visitors. On March 1, NASA’s Europa Clipper flew within 550 miles (884 kilometers) of the Red Planet’s surface…
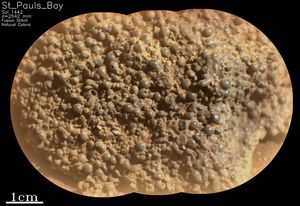
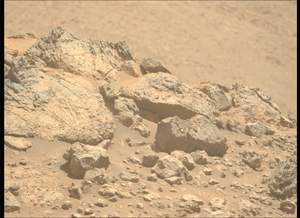
Written by Alex Jones, Ph.D. candidate at Imperial College London Last week the Perseverance Science Team were astonished by a strange rock comprised of hundreds of millimeter-sized spheres… and the team are now working hard to understand their origin. It…

Written by Denise Buckner, Postdoctoral Fellow at NASA’s Goddard Space Flight Center Perseverance is hard at work on Mars, overcoming obstacles for scientific exploration! Just a few sols after successfully sealing the challenging Green Gardens core, Perseverance roved on to…
Written by Melissa Rice, Professor of Planetary Science at Western Washington University This week, the Perseverance team faced a stubborn engineering challenge. After successfully collecting a core called “Green Gardens” from the “Tablelands” location, the rover struggled to seal the…

Written by Henry Manelski, Ph.D. student at Purdue University The Perseverance team is always looking for creative ways to use the tools we have on Mars to maximize the science we do. On the arm of the rover sits the…
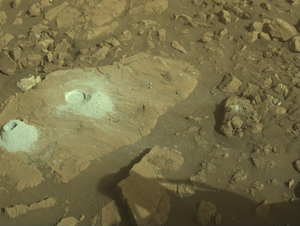
Over the past week, Perseverance has been parked at a location called “Tablelands,” an area containing the “Serpentine Lake” abrasion patch acquired a few weeks ago. The Mars 2020 team has been diligently analyzing the data from the abrasion patch,…

Perseverance’s drives over the last few weeks have doubled back several times. Why such an unconventional route? Team scientists have been delighted to find new kinds of rocks that could be the oldest ever found on Mars and are eager…

Update: Portions of this blog post have been updated, including language characterizing the “Silver Mountain” sample. The Mars 2020 Perseverance rover continues to live up to its name, pushing forward in search of ancient Martian secrets. Following a brief period…

Perseverance is defined in the Merriam-Webster dictionary as the “continued effort to do or achieve something despite difficulties, failure, or opposition.” The Mars 2020 rover team has truly embodied the rover’s namesake — from working together to launch the Perseverance…

A look back at a few Mars 2020 mission highlights of 2024 Perseverance’s past year operating on the surface of Mars was filled with some of the mission’s highest highs, but also some of its greatest challenges. True to…
Mars Images
View raw images sent back by Perseverance from its explorations on Mars.
View Image Gallery