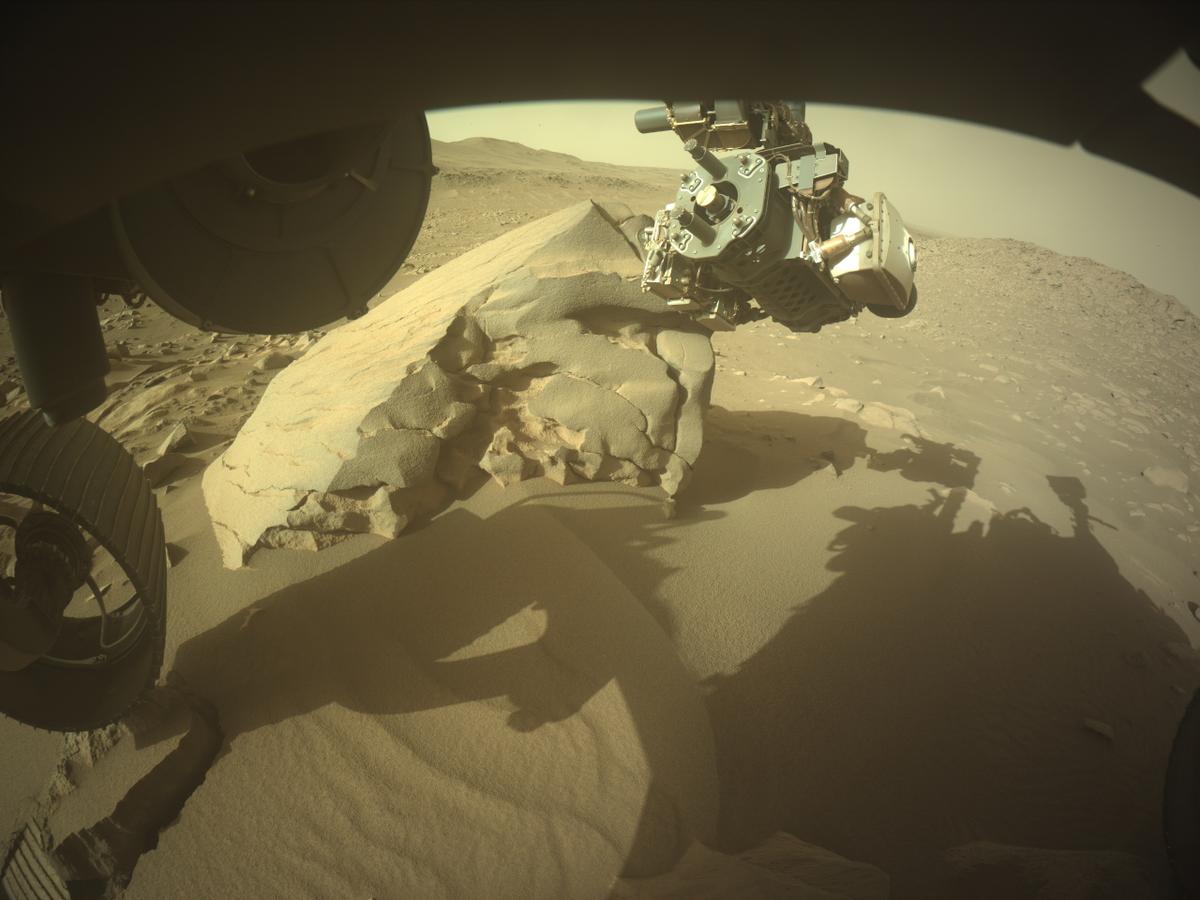
When the Perseverance rover finishes a drive and is exploring a new location, you may see it create a round, shallow hole in a nearby rock. Why does it do this, and how?
Mars rovers are robot geologists. They study the rocks around them to understand how the area was formed. However, the environment on the surface of Mars can dramatically change the exterior of a rock. The unaltered rock below the surface may hold important clues to the history of the area.
The previous rovers Spirit and Opportunity each had a Rock Abrasion Tool (RAT), a high-speed grinder with brushes to remove that weathered outer layer of rock and clear away dust. Perseverance creates abraded patches that look similar to the ones Spirit and Opportunity made, but it does so in a very different way.
Perseverance is equipped with a rotary percussive drill and a suite of interchangeable drill bits. The sampling team had the task of being able to collect cores, collect regolith, and create abraded patches all using the same drill.
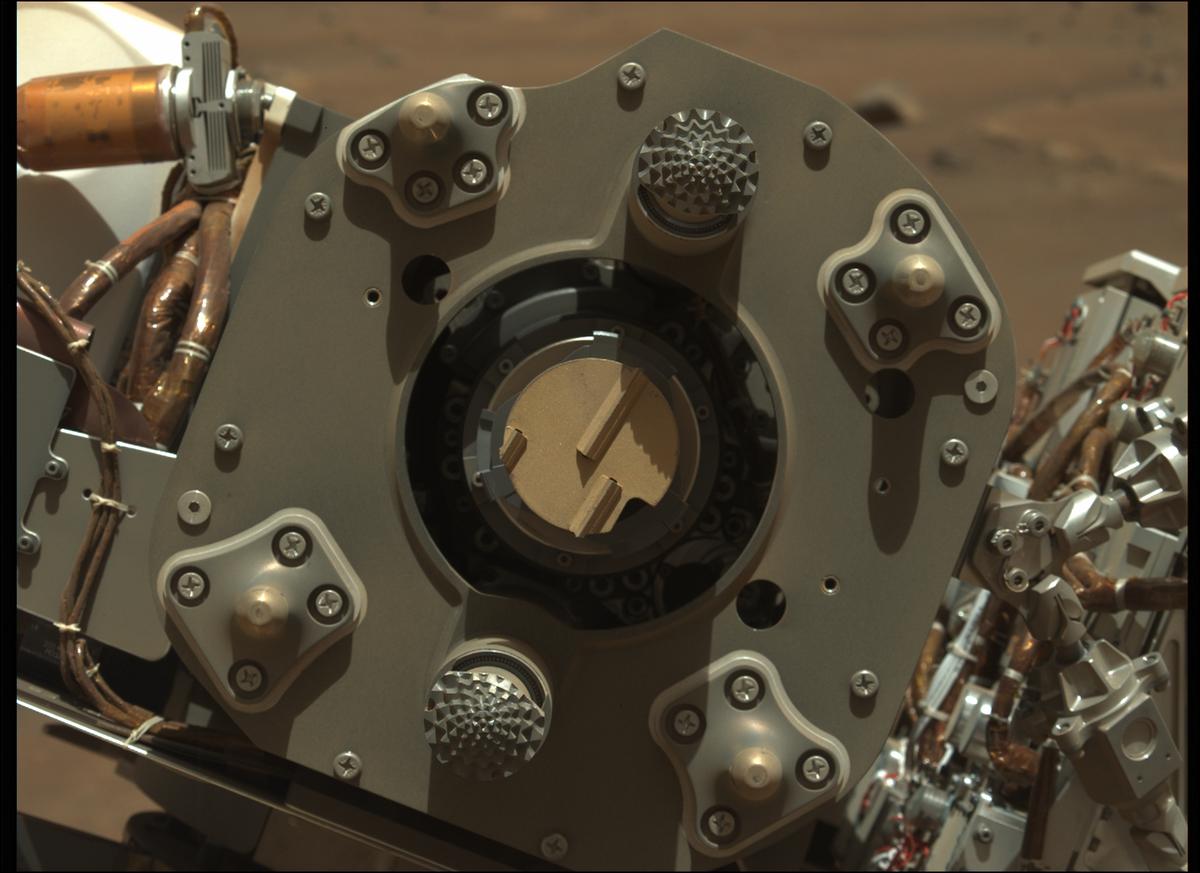
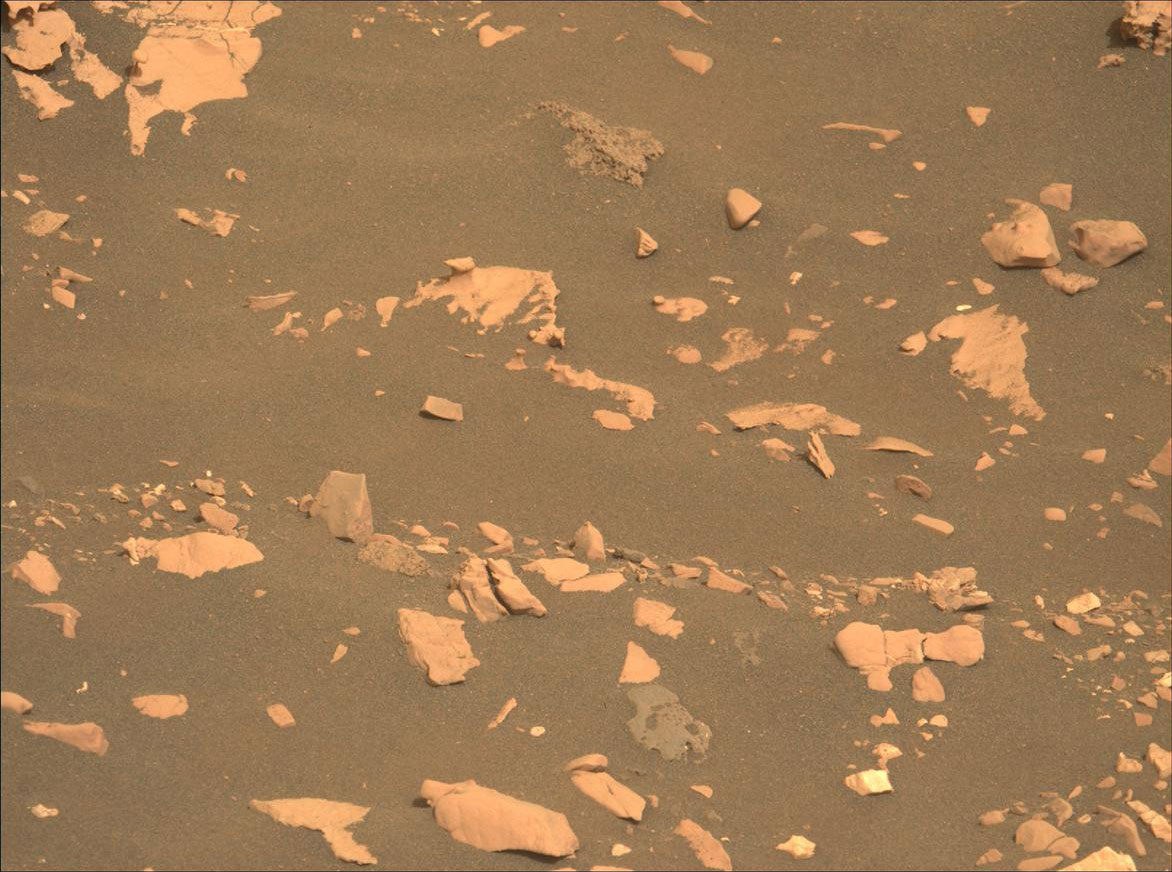
To do this, the abrading bits have an unusual tooth pattern: three parallel lines of different lengths, arranged asymmetrically. When the drill spins and hammers with an abrading bit, that tooth pattern creates crisscrossing, well distributed impacts in the rock. This chips away the surface and makes a smooth, flat patch of fresh rock about 2 inches (5 centimeters) in diameter.
However, the newly drilled abrasion is full of cuttings - the dust generated by drilling. The cuttings hide what the scientists are interested in seeing: the color and shape of individual grains in the abrasion. Perseverance removes the cuttings using another tool on the turret called the Gaseous Dust Removal Tool (GDRT). The GDRT has a tank of nitrogen gas and uses four short puffs to blow the cuttings away and reveal the fresh rock surface underneath.

The rover can then use its suite of instruments to study the abrasion. These observations provide insight into the formation of the area, and also help the team decide whether to take a core sample from that rock.
I started my career at JPL as a mechanical engineering intern working on the design of the abrading bit. Seven years later, I helped drill our first abrasion on Mars. I’m excited to hear what conclusions the scientists draw from their analysis, and to see what surprises our next abrasion holds.