As the 2021 calendar year comes to a close, it’s nice to sit back and reflect on all the progress we’ve made on Mars this year. It’s been a busy ~300 sols for both Perseverance and our helicopter sidekick, Ingenuity!
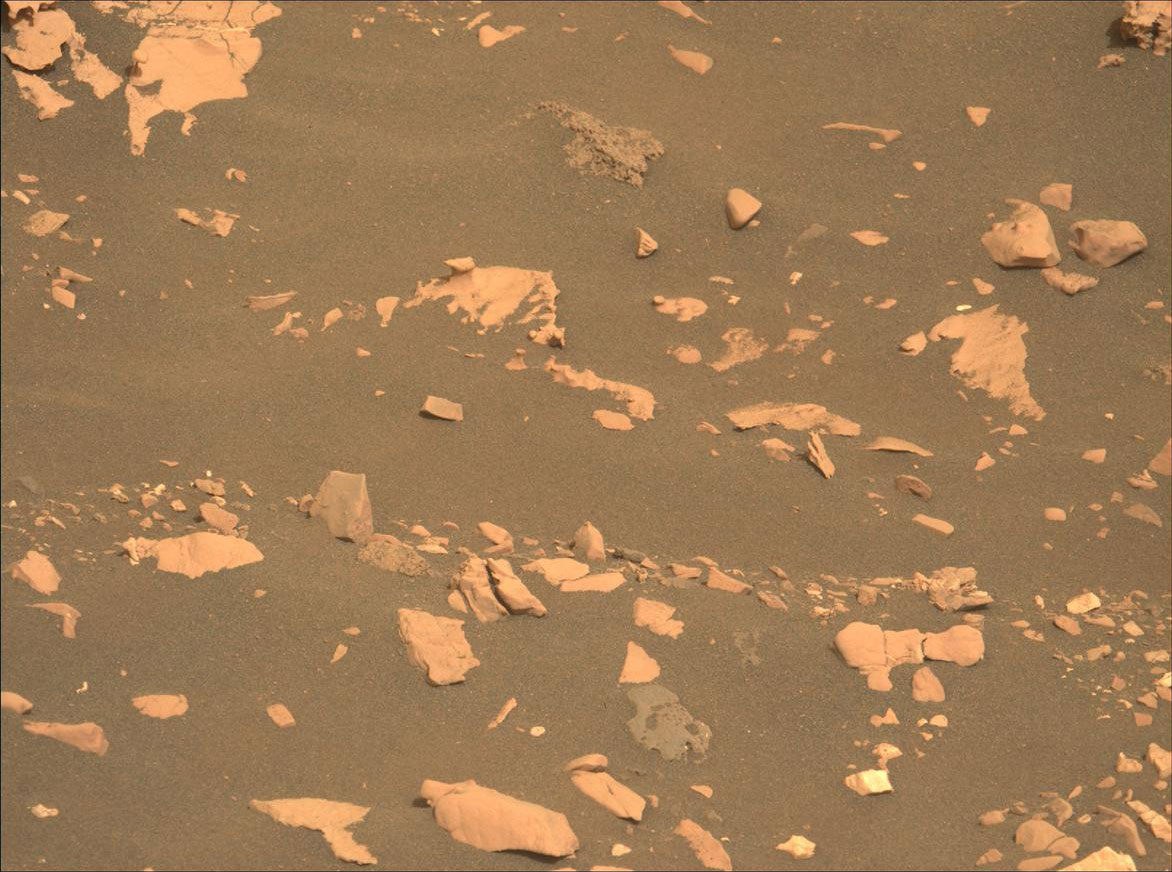
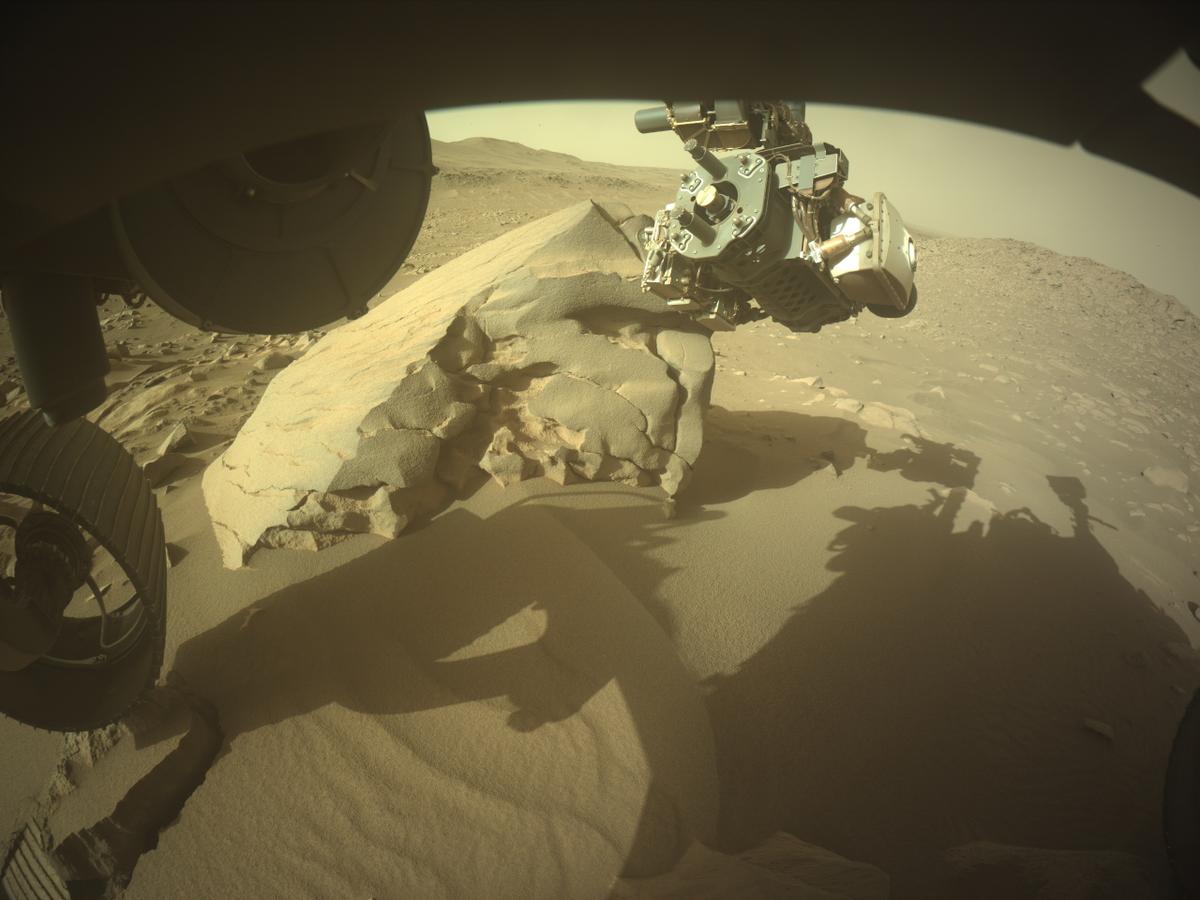
One of Perseverance’s mission objectives is to collect and store samples of the martian surface for eventual return back to Earth as part of the Mars Sample Return campaign. These samples will include a diverse assemblage of Mars surface materials including rock cores, regolith, and atmosphere. Before collecting a sample, Perseverance uses the drill to abrade the upper few millimeters of the rock surface close to the intended coring target. We then place our proximity science instruments as close as possible to the exposed rock to collect geochemical and mineralogical data. Next, samples are drilled from the martian surface into ultraclean sample tubes using a rotary-percussive drill on the end of Perseverance’s robotic arm. After drilling, each sample tube is brought inside the body of the rover, where it is assessed for sample amount, imaged, and hermetically sealed.
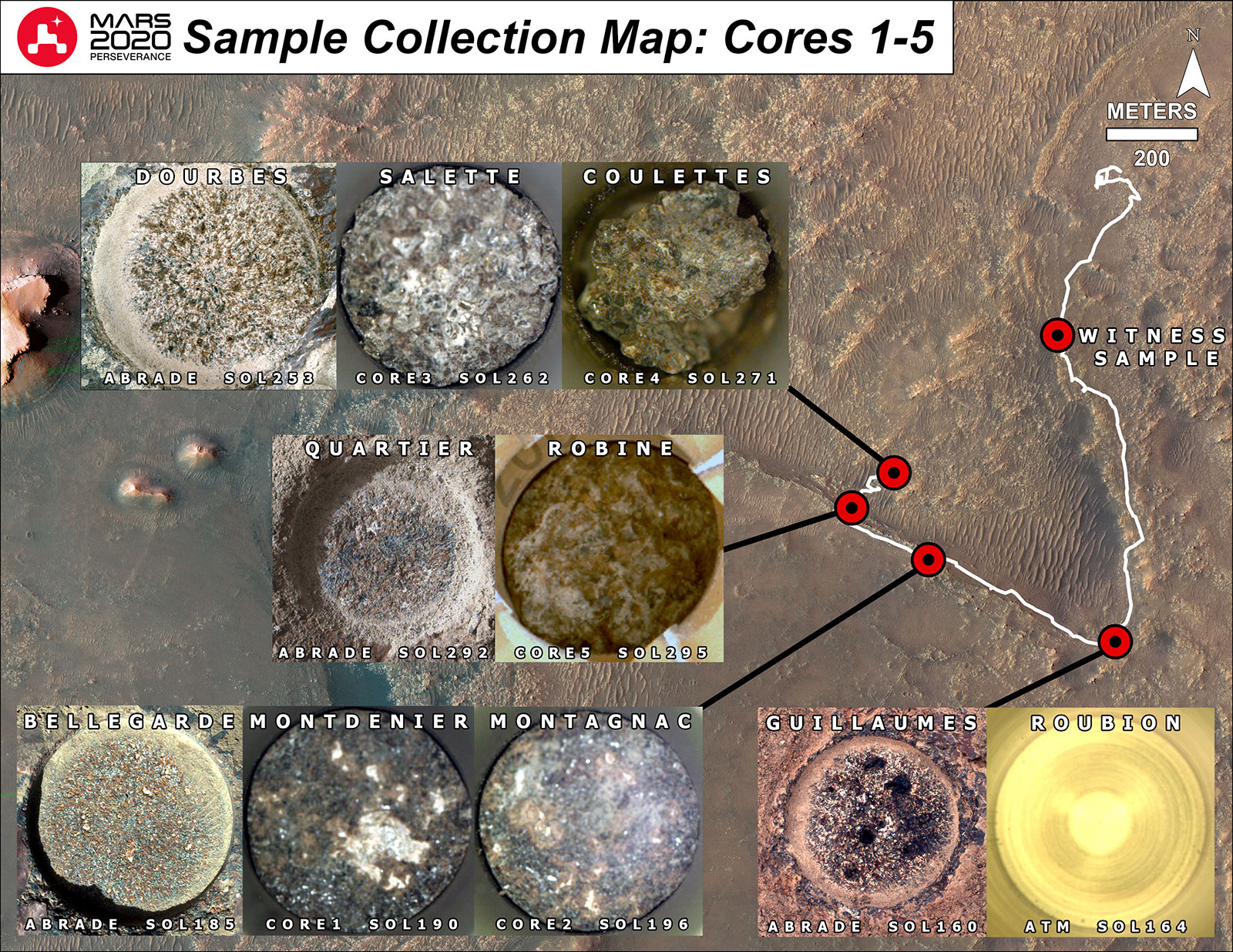
Perseverance brought 43 sample tubes to Mars, most of which will be filled with martian rock and regolith. Since landing 10 months ago, seven sample tubes have been filled:
1. The first was a witness tube. Witness tubes (Perseverance has 5) are designed to capture any contaminants shed by the rover during sampling and will be acquired periodically throughout the mission.
2. The second tube was intended to contain a rock called "Roubion," but no rock core was acquired. This unexpected outcome likely resulted from crumbling of the rock during drilling. Instead, this became our first sample of the martian atmosphere.
3&4. Our third and fourth samples were acquired as a pair at a ridge-top outcrop called "Rochette." This paired sampling strategy is designed to provide us with options in transferring samples to the follow-on missions that may bring them home. This pair of samples, called "Montdenier" and "Montagnac," were our first two collected rock cores.
5&6. In a similar paired fashion, samples 5 and 6 were collected at an outcrop called "Brac," within the "Séítah" region. These cores were called "Salette" and “Coulettes,” our third and fourth rock cores.
7. As 2021 draws to a close, Perseverance is situated in front of a rock outcrop called "Issole," where we intend to collect another pair of crater floor samples in Seitah. At the time of this writing, Perseverance has successfully filled our seventh sample tube with a rock core sample called "Robine," our fifth core! In the coming sols, Perseverance will attempt to collect another sample core before hitting the road for our next sampling location.
As a member of the science operations team for Perseverance, I’m involved in the development and execution of our sample collection strategy. To me, sampling is at the heart of the Mars 2020 mission and the perfect intersection of science and engineering. 2021 has been a busy but rewarding year for those of us on the Perseverance team. It’s especially rewarding to think that the samples that Perseverance is collecting will keep scientists busy for decades to come. I’m very excited to see the samples the Perseverance collects in 2022 and beyond!