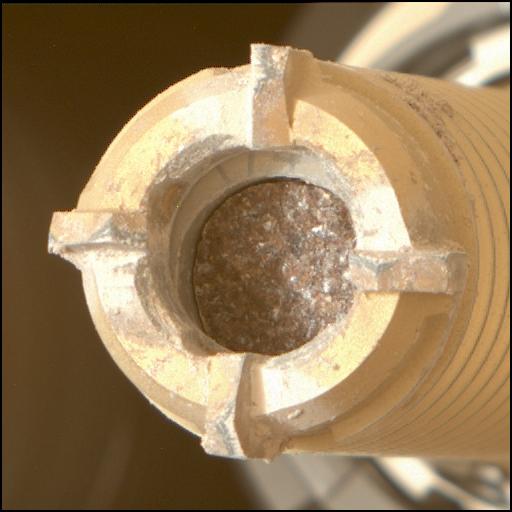
Drilling is on hold while the rover focuses on driving, so the sampling team is off studying the data we have acquired so far. What kind of information do we get from the drill, and how do the rocks we have drilled so far compare to each other?
One of the first things we look at is how difficult it was for the drill to make progress through the rock. The rover has a rotary percussive drill, which means the drill bit pushes against the rock while spinning and hammering. When we are coring or abrading, an algorithm controls the amount of force and percussion. We call this algorithm “prodapt,” short for proprioceptive adaptive, because the drill adjusts its settings by sensing and assessing its own performance in real time. The goal is to try and maintain a certain rate of progress into the rock that isn’t too slow or too fast. The rate we aim for keeps our drill bits healthy and creates high quality cores and abrasions for the scientists.
The prodapt algorithm can range from level 0 to level 20. Levels 0 through 2 have no percussion at all, which we call rotary only drilling. (We never do rotary only abrading, so these low levels are only used while coring.) Level 3 has light percussion, and the percussion and force increase all the way up to the most force and the most percussion at level 20.
If the drill senses that it is not making fast enough progress through a rock, it will increase the prodapt level. If it senses that it is making progress too quickly, it will decrease the level. One note: although hard rocks often require higher levels, the interaction between the drill and the rock is complex, so prodapt level doesn’t always match up with rock strength. A rock might require high drill levels but break easily if a different type of tool was used.
So which rock required the lowest prodapt levels, and which rock required the highest? We have done a set of one abrasion and two cores on four different rocks so far:
- Rochette (August - September 2021)
- Brac (November 2021)
- Issole (December 2021 - February 2022)
- Sid (March 2022)
Let’s start with the rock that required the lowest levels: Issole. It was so easy to drill that the algorithm dipped into rotary only mode for part of both cores. The second easiest rock was Brac and the third easiest was Rochette. Both used prodapt levels in the middle of the range with no rotary only coring. Finally, the rock that required the highest prodapt levels so far was Sid. This rock was challenging to drill through, and both cores required some level 20 drilling to maintain the goal rate of progress!
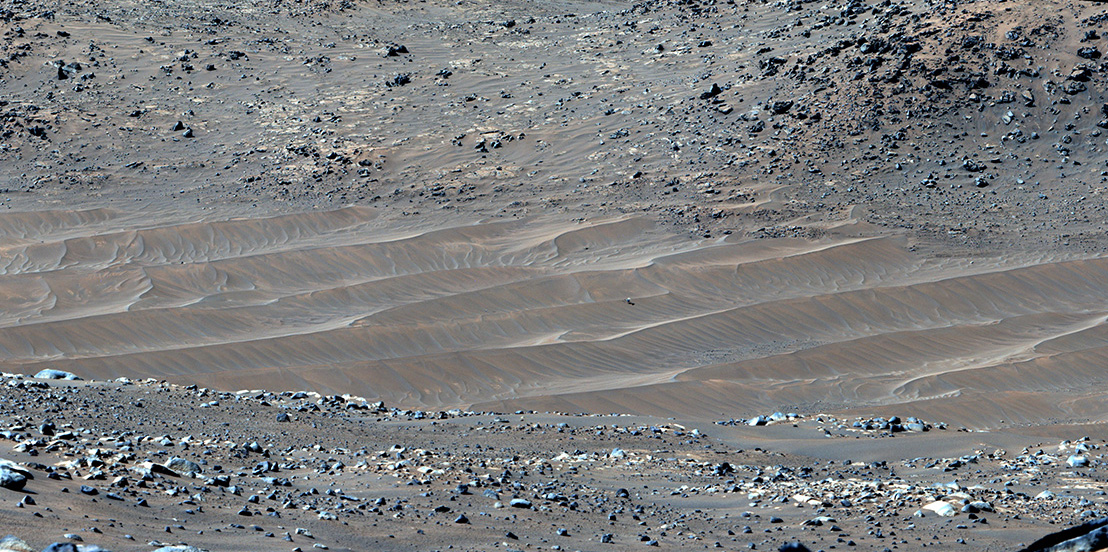
The sampling team is excited to reach the delta and drill in a new area. In the meantime, the rover continues to make great progress, and has recently reached a total distance traveled of 5 miles (8 km).