Perseverance Takes First Core From the Delta Written by Iona (Brockie) Tirona, Sampling Engineer at NASA's Jet Propulsion Laboratory
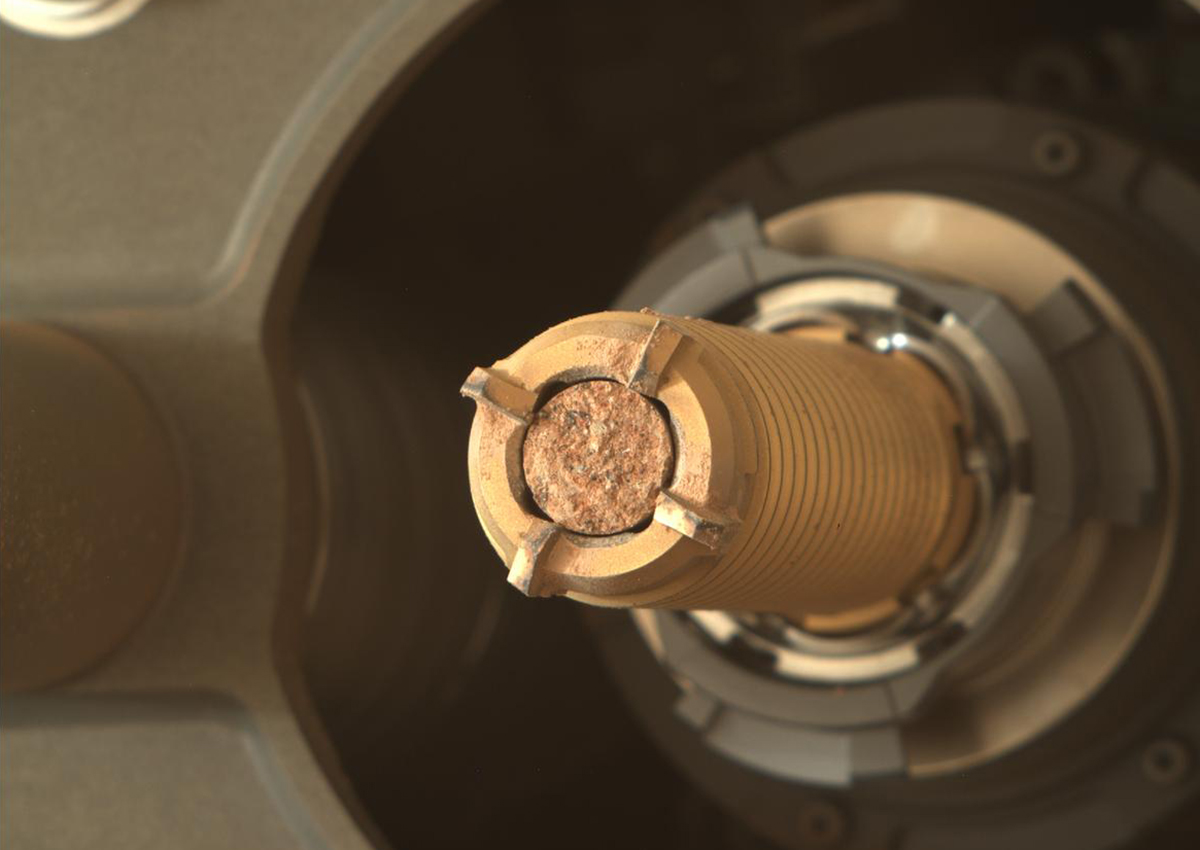
Mars Perseverance Sol 490 - Right Mastcam-Z Camera: The Swift Run core inside the coring bit.
Credits: NASA/JPL-Caltech/ASU.
Download image ›
Perseverance has taken its first sample from the Jezero delta!
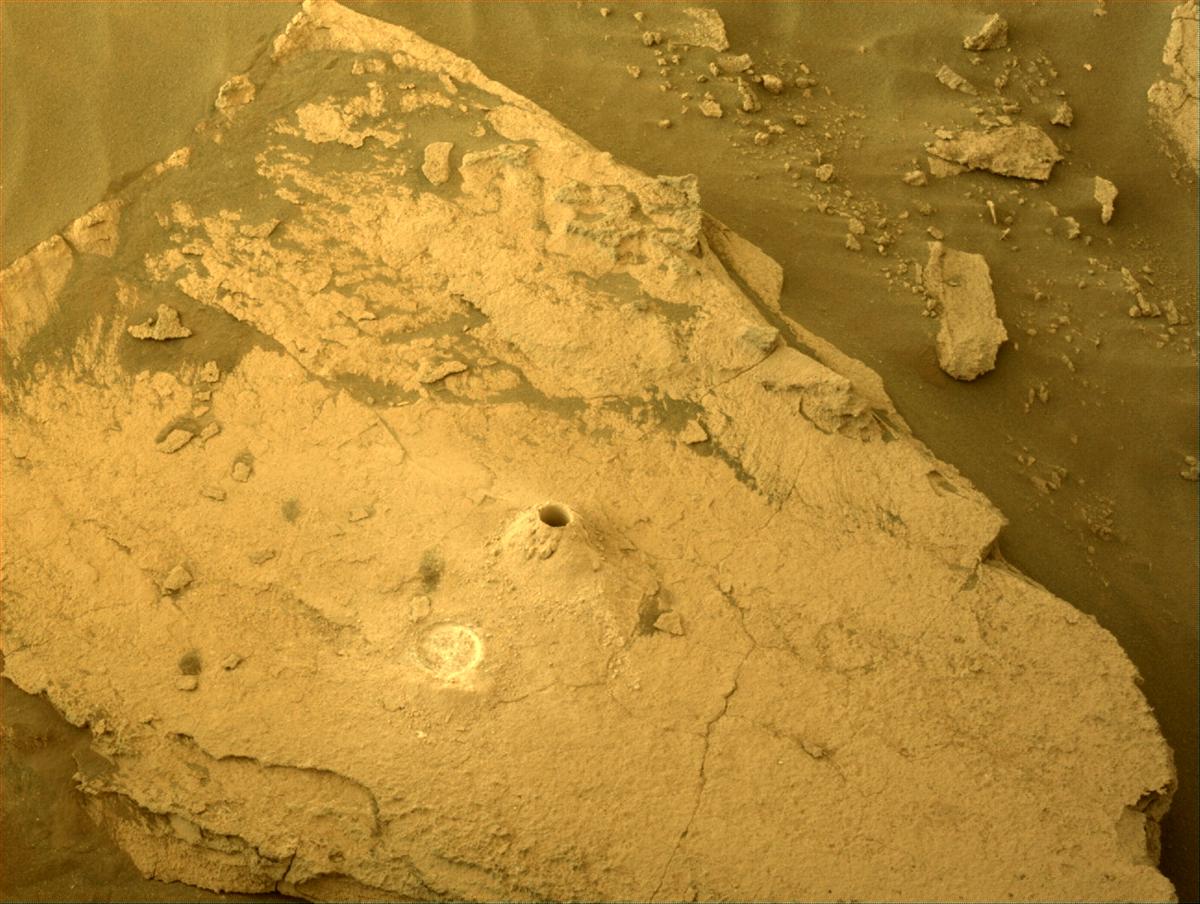
Mars Perseverance Sol 482: WATSON Camera: The abraded patch Thornton Gap. Note the visible clasts in the rock. Credits: NASA/JPL-Caltech. Download image ›Since arriving at the delta, the rover has been observing and abrading different rocks to inform whether they are good candidate for our first core sample in this area. The first few rocks that were considered either fractured too easily or had surfaces that were too rough to safely place the drill. The team searched for a rock with the following:
scientifically interesting,
a manageable amount of surface topography,
large enough to fit an abrasion and two cores, and
predicted to be robust to drilling.
The best candidate was a rock named Skinner Ridge.
The first activity on this rock was an abrasion called Thornton Gap, and immediately the team was excited. The abrasion was successful, revealing the inner surface of the rock without fracturing the surrounding area. It revealed that this rock contained individual clasts with clear boundaries. The rover’s full instrument suite was used to investigate and document the abraded patch, then it was time to core.
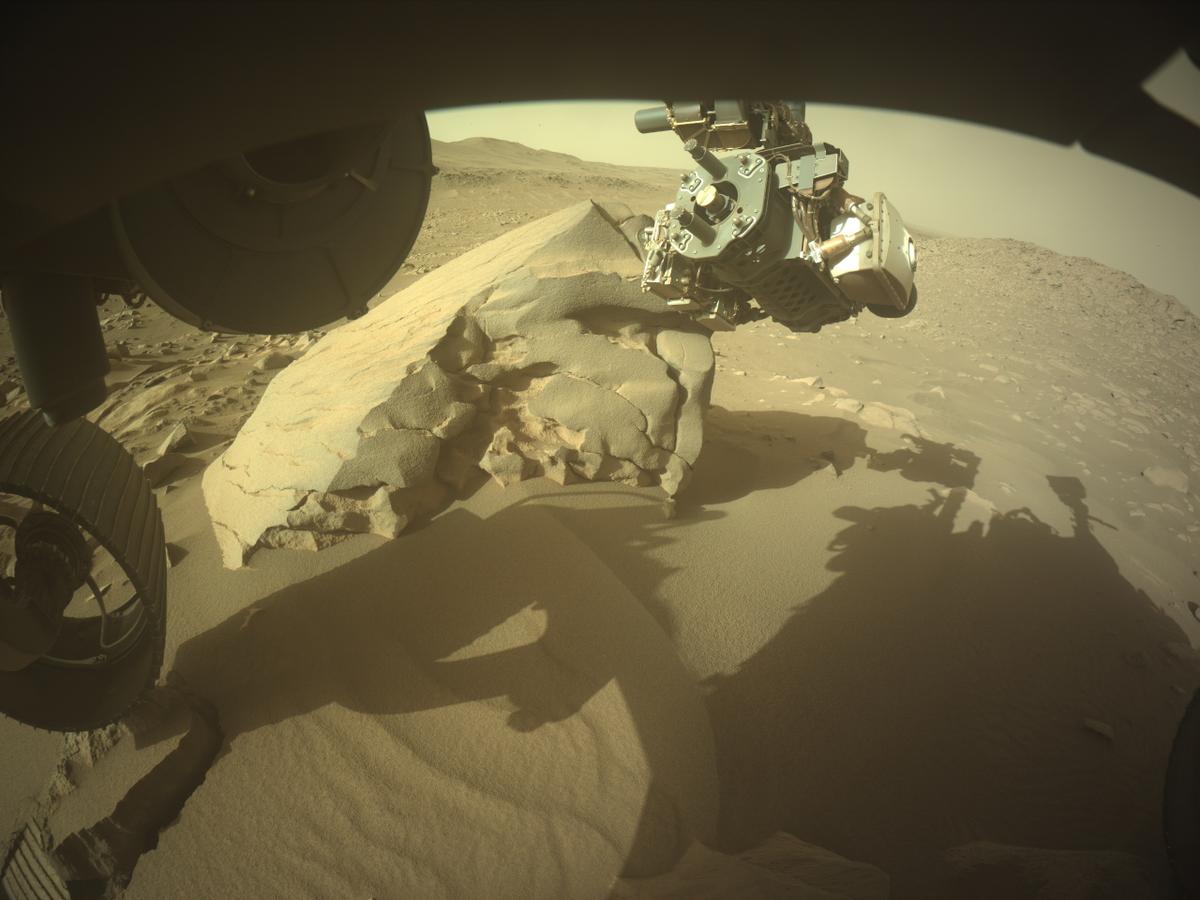
Mars Perseverance Sol 490 - Left Navigation Camera:The abraded patch and coring borehole on the rock Skinner Ridge. Credits: NASA/JPL-Caltech. Download image ›It turned out to be a great choice. The core was named Swift Run, and collecting it went very smoothly. At 6.70 cm long, it is our longest core of the mission so far. Perhaps even more exciting was to see that those same clasts visible in the abraded patch were also visible in the core. The drill data showed that the rock was one of the softer ones we have cored so far. It only required low levels of percussion to make progress through the rock, occasionally turning off percussion altogether when rotary only drilling was sufficient.
One last note for anyone wondering where these names come from. The Perseverance mission names areas after different national parks on Earth. Rocks, abrasions, and cores are given names related to the current area. The rover is currently in the Shenandoah quadrangle, named for the U.S. National Park in Virginia. Skinner Ridge, Thornton Gap, and Swift Run are all features in Shenandoah.
About This Blog
These blog updates are provided by self-selected Mars 2020 mission team members who love to share what Perseverance is doing with the public.
Dates of planned rover activities described in these blogs are subject to change due to a variety of factors related to the Martian environment, communication relays and rover status.
The Perseverance rover has tools to study the history of its landing site, seek signs of ancient life, collect rock and soil samples, and help prepare for human exploration of Mars. The rover carries: