












We’ve all walked outside on a cold morning and seen frost on the grass, but you might be surprised to know that frost can also form on Mars!
We’ve all walked outside on a cold morning and seen frost on the grass, but you might be surprised to know that frost can also form on Mars! Several missions have searched for frost including Opportunity and most recently Curiosity with its REMS and ChemCam instruments. This week, Perseverance followed in its siblings’ footsteps by searching for frost at Jezero Crater using its MEDA and SuperCam instruments. The presence of frost could have important implications for our study of the geology and water cycle of Jezero Crater and Mars as a whole.
Frost forms when the ground temperature gets below the frost point. The frost point is the temperature below which water vapor in the air can turn directly into solid ice on the ground. The frost point changes based on the humidity of the air. Perseverance’s Mars Environmental Dynamics Analyzer (MEDA) instrument collects temperature and humidity data, allowing us to predict which sols have the best conditions for frost formation. Once conditions permit frost formation, SuperCam steps in.
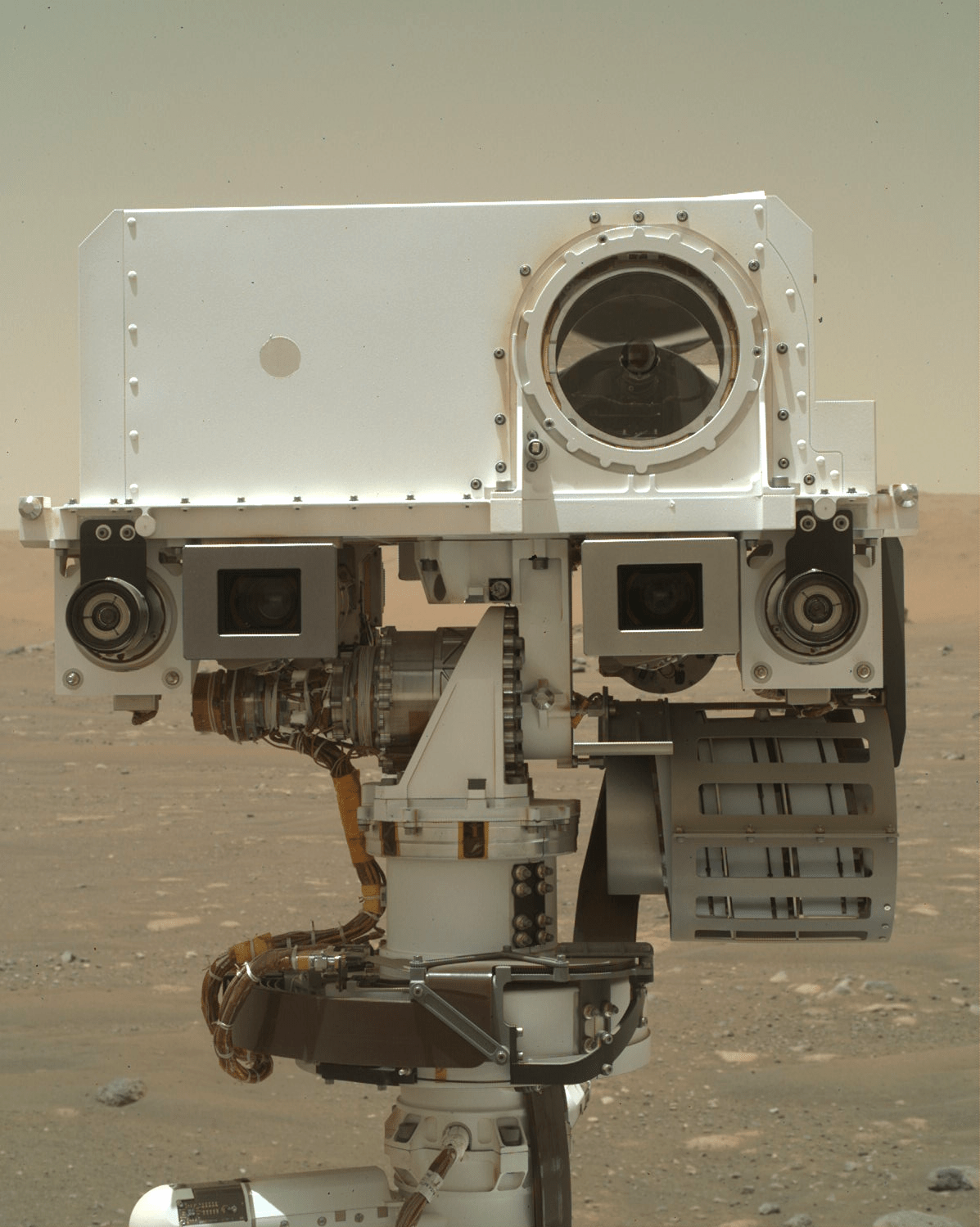
SuperCam utilizes several remote-sensing techniques to study the geology of nearby rocks. We use two techniques to detect frost: Laser Induced Breakdown Spectroscopy (LIBS) and Raman spectroscopy. Both involve ‘zapping’ nearby rocks with a high-powered laser and analyzing the reflected light. LIBS uses a focused red (1064nm) laser which generates a tiny amount of hot plasma on the rock, while Raman uses a softer green (532nm) laser which merely stimulates the molecules on the surface of the rock. LIBS spectra reveal hints about the rock’s elemental composition while Raman spectra reveal hints about the rock’s mineralogical composition. In addition, a microphone records each LIBS shot to analyze the hardness of the rock at different depths.
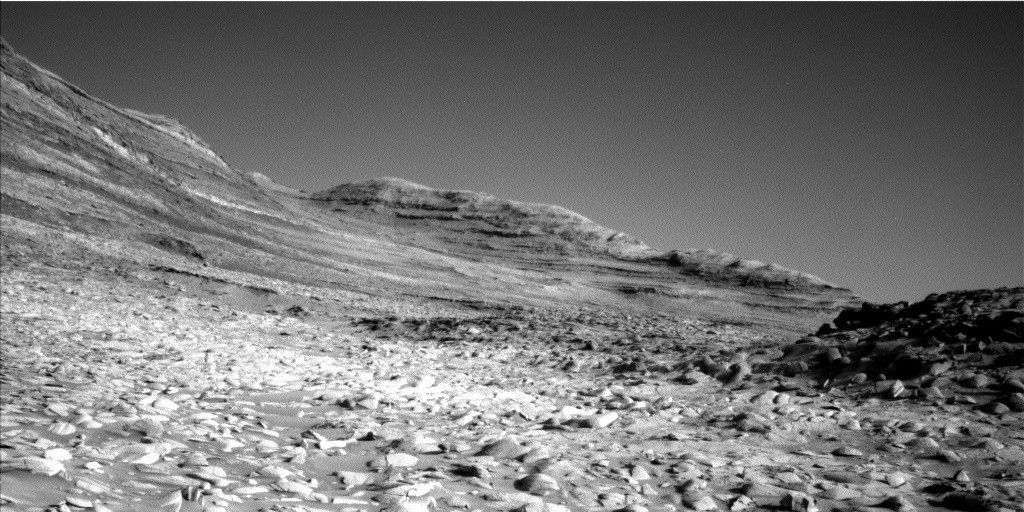
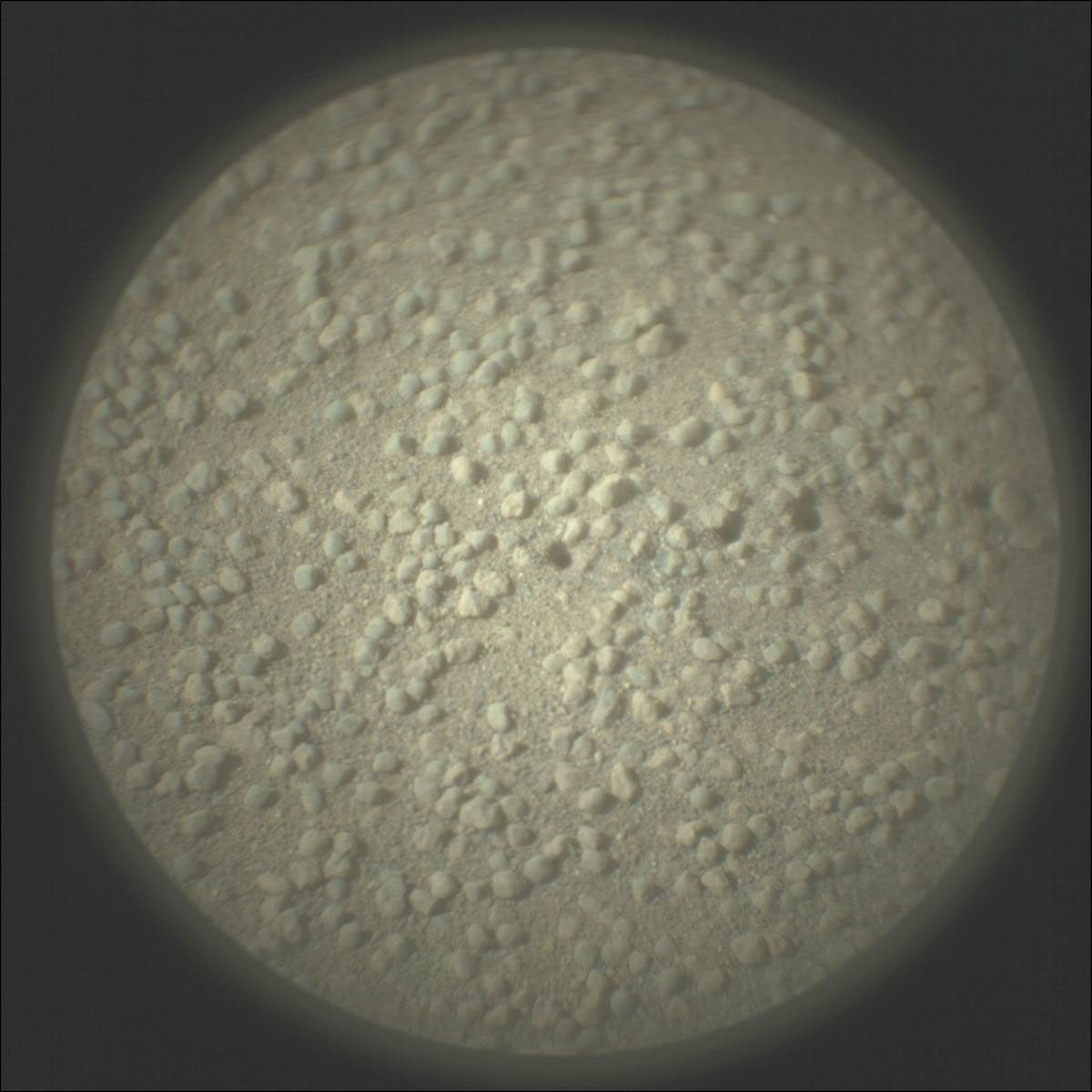
Now is the perfect time to search for frost since it’s the peak of winter at Jezero Crater. Last week I helped plan our first SuperCam frost detection activity which consisted of two observations on a nearby soil target. The first, named Red Mountain, occurred in the afternoon of sol 546 (September 2nd) when frost wasn’t expected. The second, named Snowy Mountain, occurred at dawn on sol 548 (September 4th) when conditions could foster frost formation. If frost exists on the Snowy Mountain target, we should detect hydrogen in the LIBS spectra and O-H bonds in the Raman spectra in greater quantities than in the Red Mountain spectra. We’re also listening for a soft acoustic signal in the first LIBS shot of Snowy Mountain which could indicate a frost layer as thin as ~10 microns.
I’m excited to see how our frost campaign shapes our understanding of Jezero Crater and beyond!
Written by Matthew Brand, SuperCam/ChemCam Engineer at Los Alamos National Laboratory