
Entry, Descent, and Landing
Entry, Descent, and Landing – often referred to as "EDL" – is the shortest and most intense phase of the Mars 2020 mission. It begins when the spacecraft reaches the top of the Martian atmosphere, travelling nearly 12,500 miles per hour (20,000 kilometers per hour). It ends about seven minutes later, with Perseverance stationary on the Martian surface. To safely go from those speeds down to zero, in that short amount of time, while hitting a narrow target on the surface, requires “slamming on the brakes” in a very careful, creative and challenging way.
Experience Entry, Descent, and Landing
Landing on Mars is hard. Only about 40 percent of the missions ever sent to Mars – by any space agency - have been successful. Hundreds of things have to go just right during this nail-biting drop. What’s more, Perseverance has to handle everything by itself. During the landing, it takes more than 11 minutes to get a radio signal back from Mars, so by the time the mission team hears that the spacecraft has entered the atmosphere, in reality, the rover is already on the ground. So, Perseverance is designed to complete the entire EDL process by itself – autonomously.

How the Landing Plays Out
Final Preparations
Ten minutes before entering the atmosphere, the spacecraft sheds its cruise stage, which houses solar panels, radios, and fuel tanks used during its flight to Mars. Only the protective aeroshell – with rover and descent stage inside – makes the trip to the surface. Before entering the atmosphere, the vehicle fires small thrusters on the backshell to reorient itself and make sure the heat shield is facing forward for what comes next.
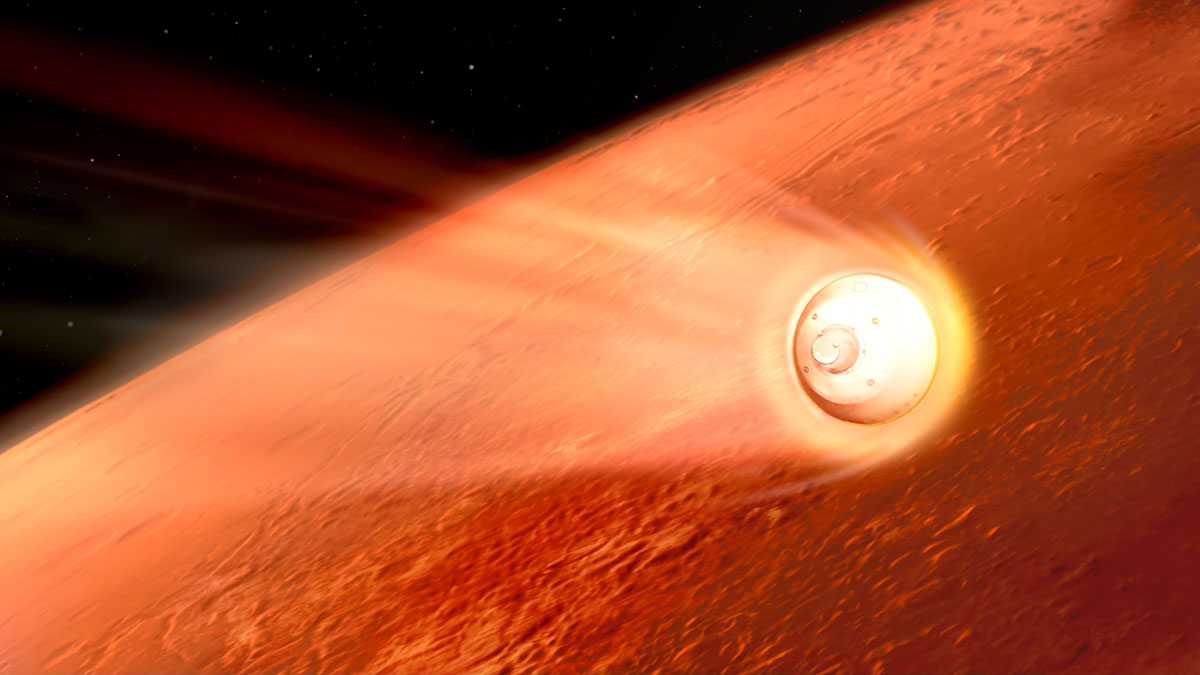
Atmospheric Entry
As the spacecraft enters the Martian atmosphere, the drag produced drastically slows it down – but these forces also heat it up dramatically. Peak heating occurs about 80 seconds after atmospheric entry, when the temperature at the external surface of the heat shield reaches about 2,370 degrees Fahrenheit (about 1,300 degrees Celsius). Safe in the aeroshell, however, the rover gets up to only about room temperature.
As it begins to descend through the atmosphere, the spacecraft encounters pockets of air that are more or less dense, which can nudge it off course. To compensate, it fires small thrusters on its backshell that adjust its angle and direction of lift. This “guided entry” technique helps the spacecraft stay on the path to its downrange target.
Parachute Deployment
The heat shield slows the spacecraft to under 1,000 miles per hour (1,600 kilometers per hour). At that point, it’s safe to deploy the supersonic parachute. To nail the timing of this critical event, Perseverance uses a new technology – Range Trigger – to calculate its distance to the landing target and open the parachute at the ideal time to hit its mark.

The parachute, which is 70.5 feet (21.5 meters) in diameter, deploys about 240 seconds after entry, at an altitude of about 7 miles (11 kilometers) and a velocity of about 940 mph (1,512 kph).
Zeroing In on Landing
Twenty seconds after parachute deployment, the heat shield separates and drops away. The rover is exposed to the atmosphere of Mars for the first time, and key cameras and instruments can begin to lock onto the fast-approaching surface below. Its landing radar bounces signals of the surface to figure out its altitude. Meanwhile, another new EDL technology – Terrain-Relative Navigation – kicks in.
Using a special camera to quickly identify features on the surface, the rover compares these to an onboard map to determine exactly where it’s heading. Mission team members have mapped in advance the safest areas of the landing zone. If Perseverance can tell that it’s headed for more hazardous terrain, it picks the safest spot it can reach and gets ready for the next dramatic step.
Powered Descent
In the thin Martian atmosphere, the parachute is only able to slow the vehicle to about 200 miles per hour (320 kilometers per hour). To get to its safe touchdown speed, Perseverance must cut itself free of the parachute, and ride the rest of the way down using rockets.
Directly above the rover, inside the backshell, is the rocket-powered descent stage. Think of it as a kind of jetpack with eight engines pointed down at the ground. Once it’s about 6,900 feet (2,100 meters) above the surface, the rover separates from the backshell, and fires up the descent stage engines.

The descent stage quickly diverts to one side or the other, to avoid being impacted by the parachute and backshell coming down behind it. The direction of its divert maneuver is determined by the safe target selected by the computer that runs Terrain-Relative Navigation.
Skycrane Maneuver
As the descent stage levels out and slows to its final descent speed of about 1.7 miles per hour (2.7 kilometers per hour), it initiates the “skycrane” maneuver. With about 12 seconds before touchdown, at about 66 feet (20 meters) above the surface, the descent stage lowers the rover on a set of cables about 21 feet (6.4 meters) long. Meanwhile, the rover unstows its mobility system, locking its legs and wheels into landing position.
As soon as the rover senses that its wheels have touched the ground, it quickly cuts the cables connecting it to the descent stage. This frees the descent stage to fly off to make its own uncontrolled landing on the surface, a safe distance away from Perseverance.
Save the Date
Known by the team as the “Seven Minutes of Terror,” the Entry, Descent, and Landing for Perseverance will be broadcast live as the rover arrives at Mars on Feb. 18, 2021.