
















Mars: News & Features
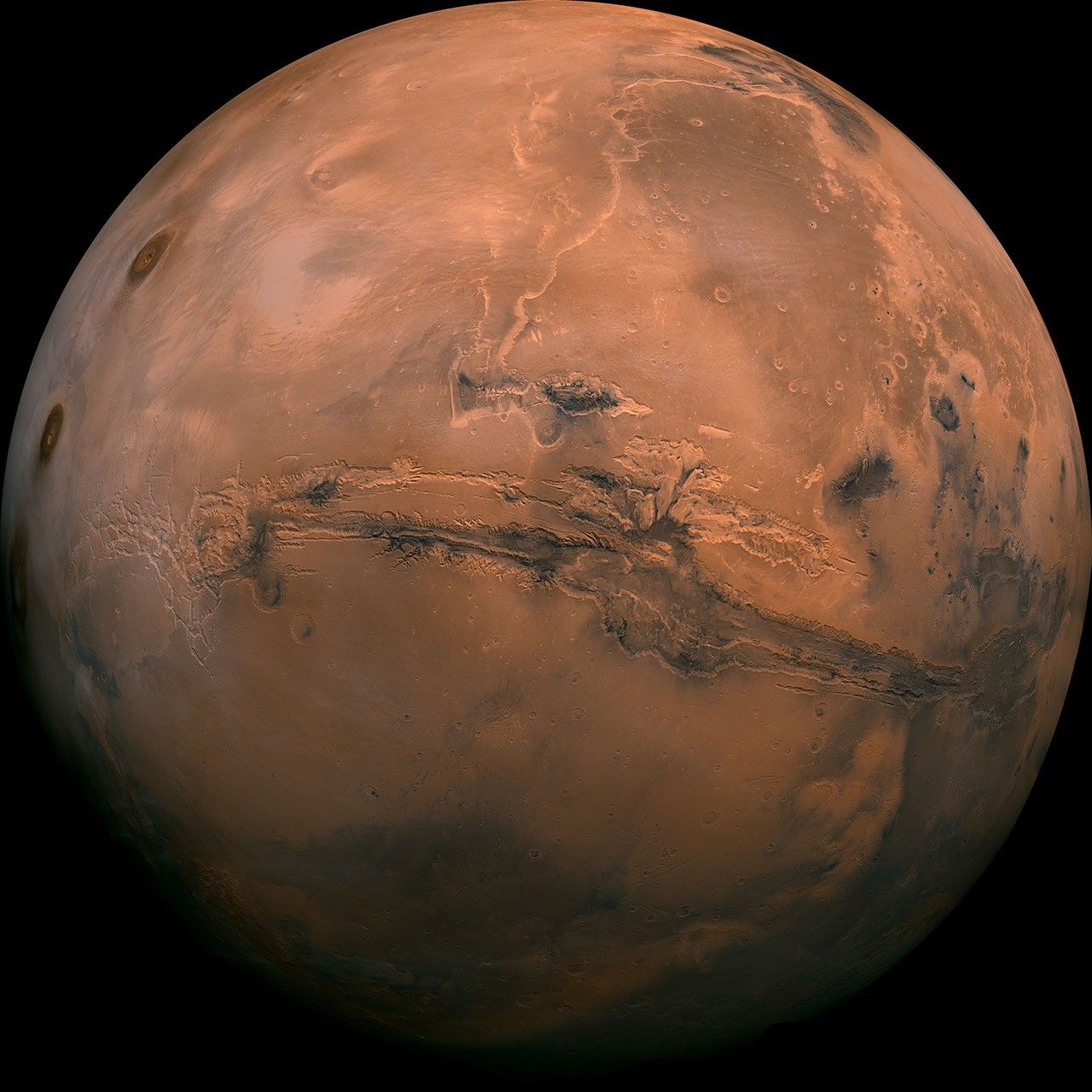
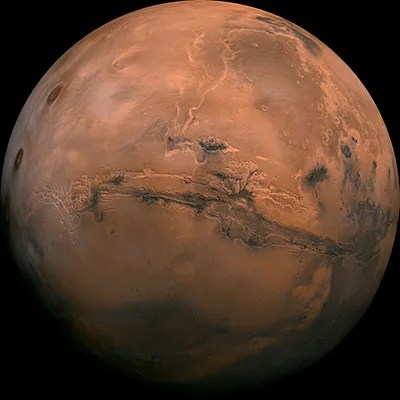
A new international study partially funded by NASA on how Mars got its iconic red color adds to evidence that Mars had a cool but wet and potentially habitable climate in its ancient past. The current atmosphere of Mars is…
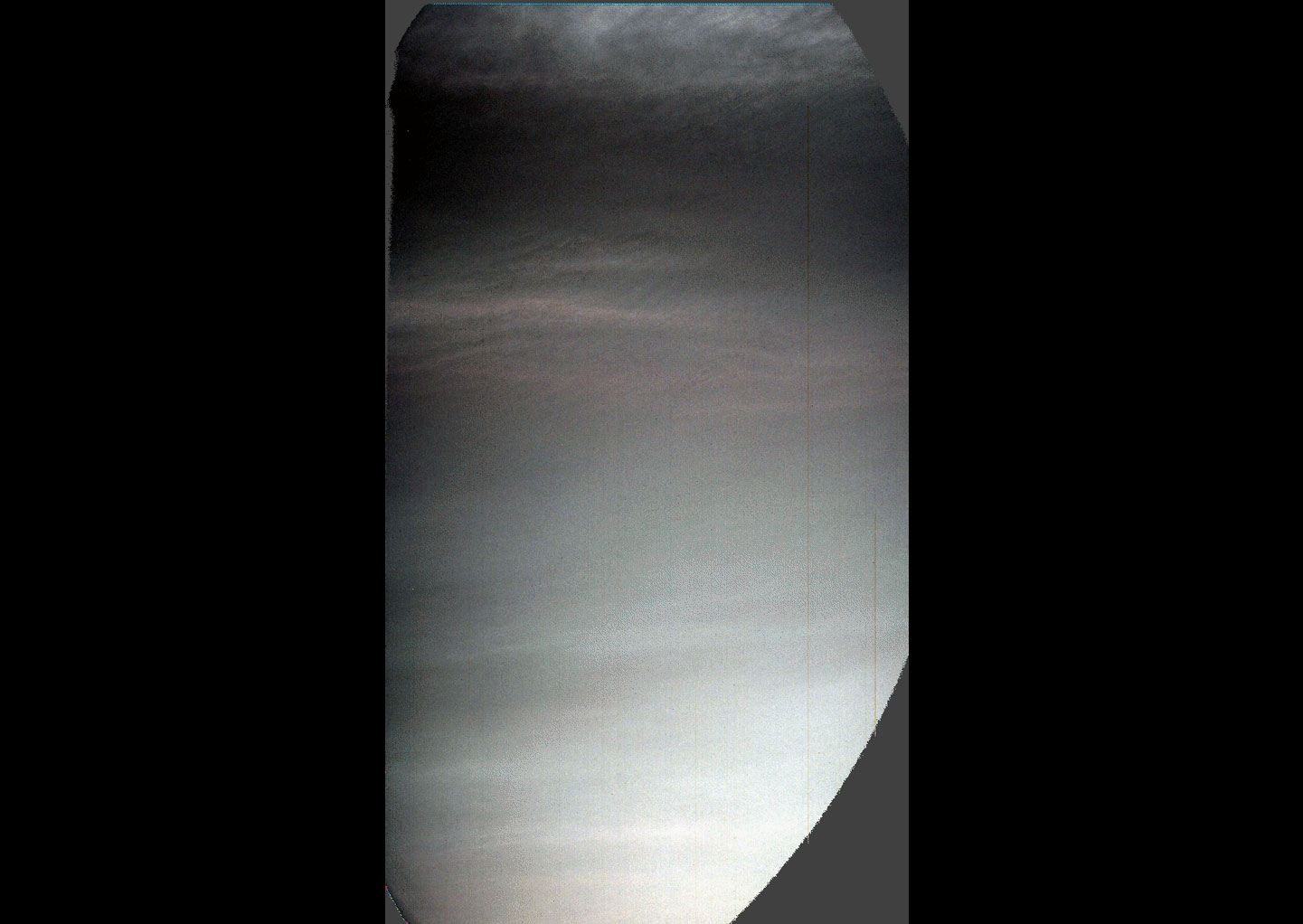
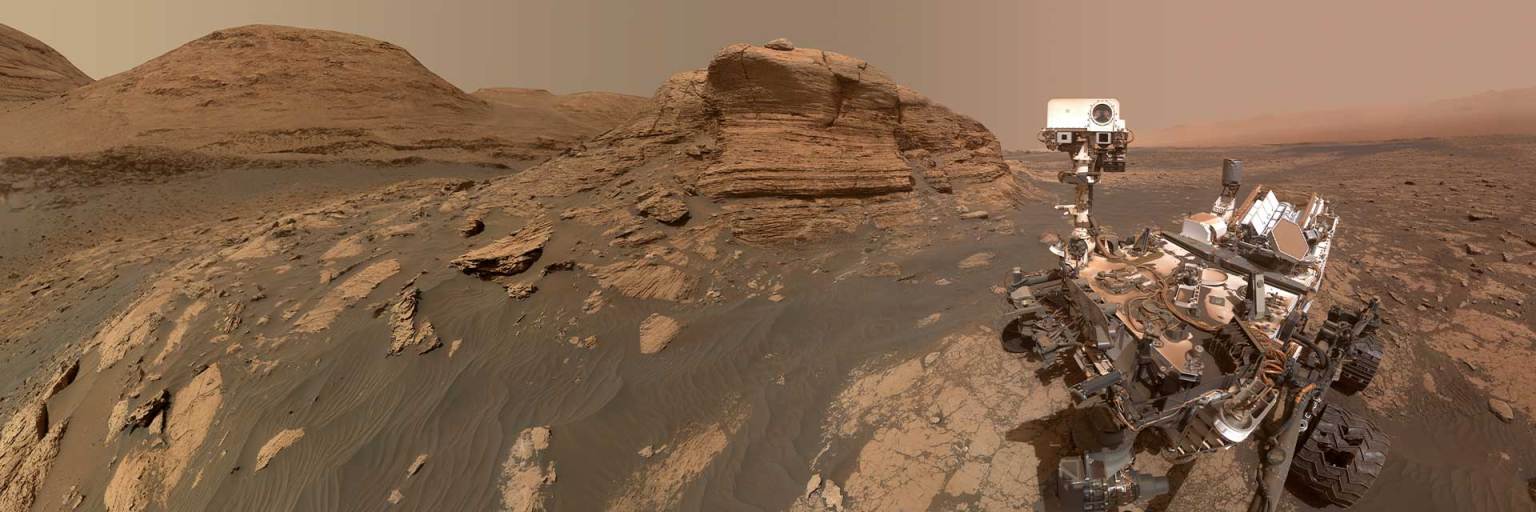
While the Martian clouds may look like the kind seen in Earth’s skies, they include frozen carbon dioxide, or dry ice. Red-and-green-tinted clouds drift through the Martian sky in a new set of images captured by NASA’s Curiosity rover using…

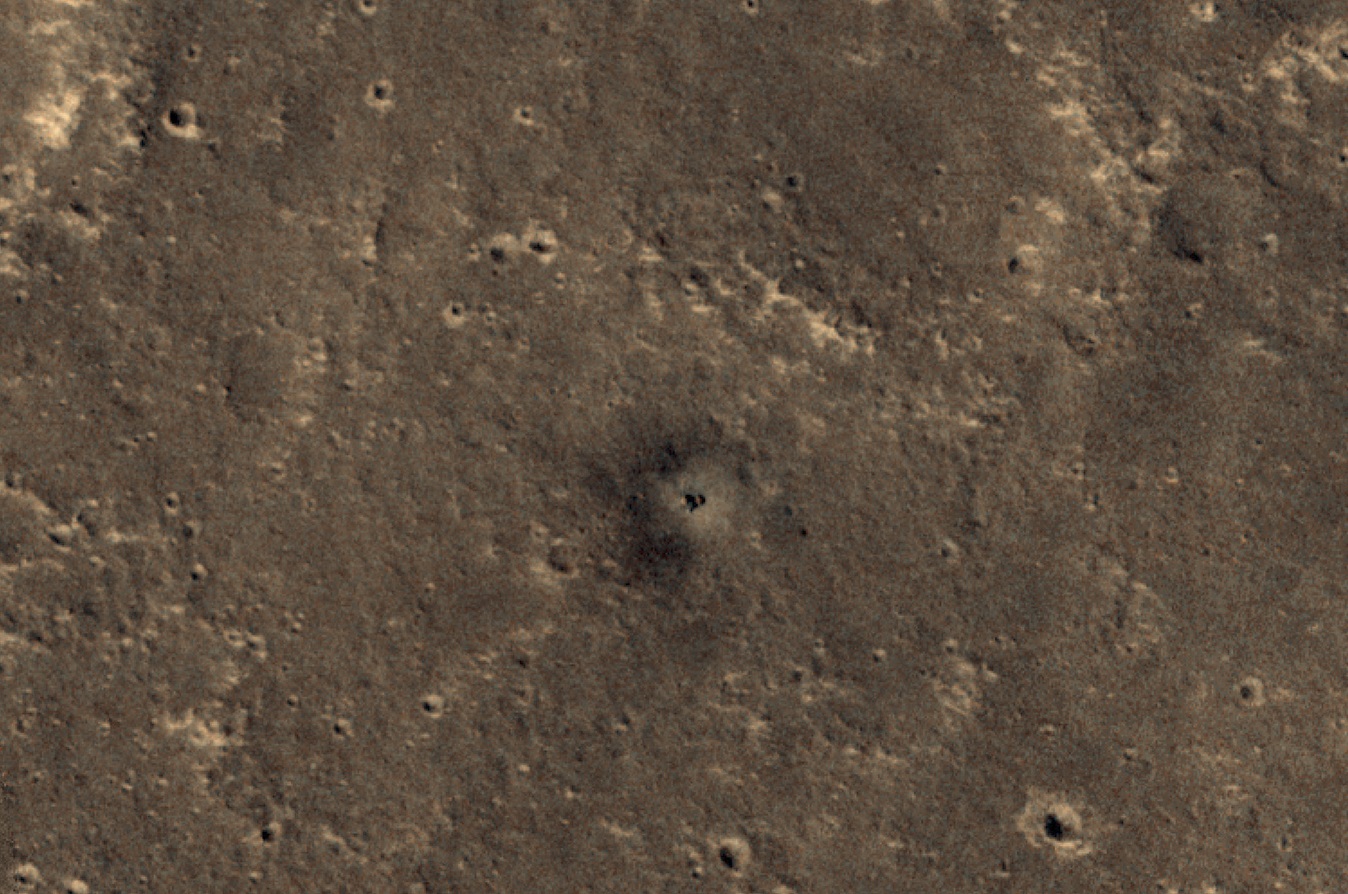
With help from AI, scientists discovered a fresh crater made by an impact that shook material as deep as the Red Planet’s mantle. Meteoroids striking Mars produce seismic signals that can reach deeper into the planet than previously known. That’s…
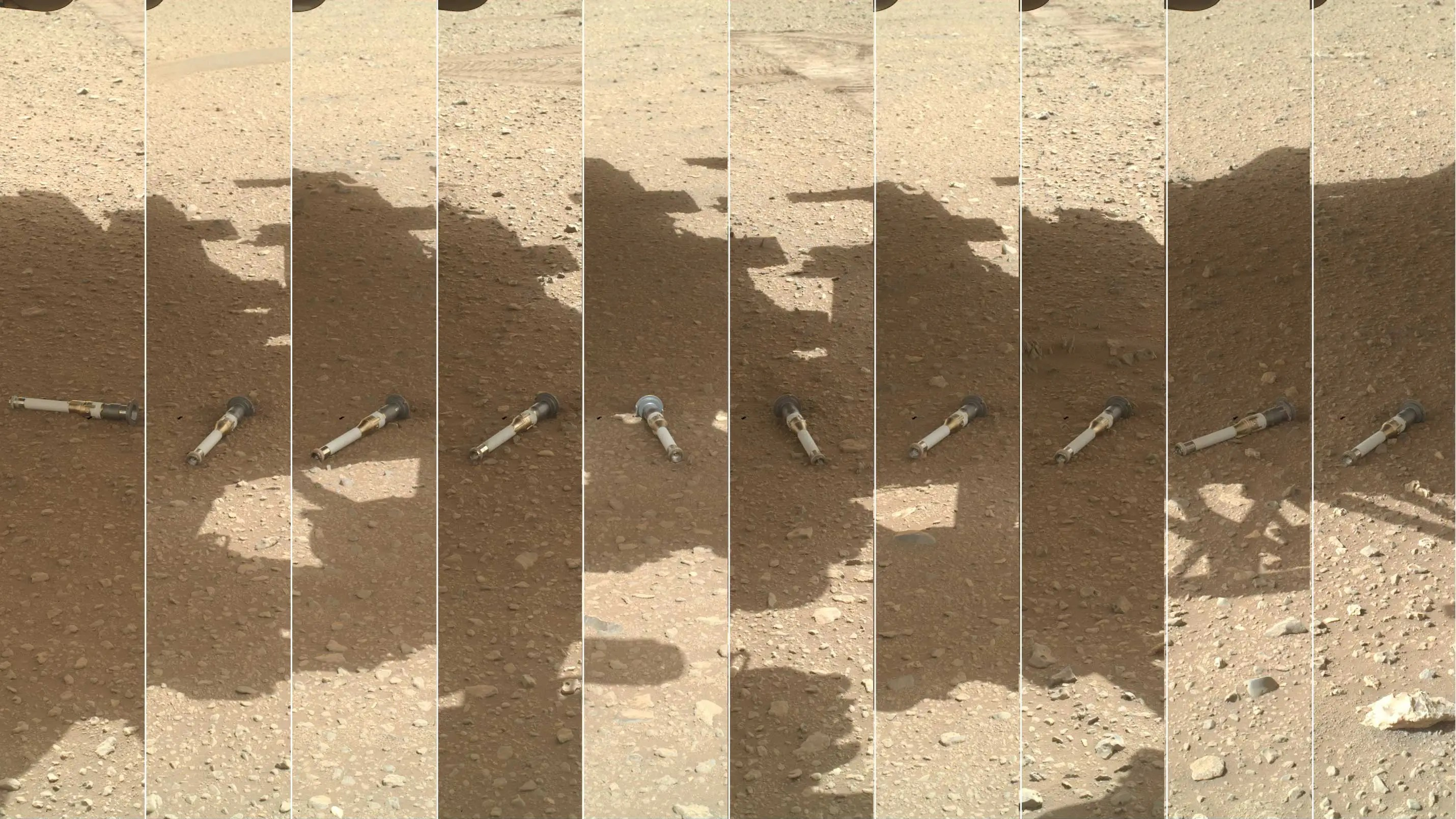
To maximize chances of successfully bringing the first Martian rock and sediment samples to Earth for the benefit of humanity, NASA announced Tuesday a new approach to its Mars Sample Return Program. The agency will simultaneously pursue two landing architectures,…
NASA Administrator Bill Nelson and Nicky Fox, associate administrator, Science Mission Directorate, will host a media teleconference at 1 p.m. EST, Tuesday, Jan. 7, to provide an update on the status of the agency’s Mars Sample Return Program. The briefing…

Have you looked up at the night sky this season and noticed a bright object sporting a reddish hue to the left of Orion? This is none other than the planet Mars! January will be an excellent opportunity to spot…

Instead of a winter wonderland, the Red Planet’s northern hemisphere goes through an active — even explosive — spring thaw. While New Year’s Eve is around the corner here on Earth, Mars scientists are ahead of the game: The Red…
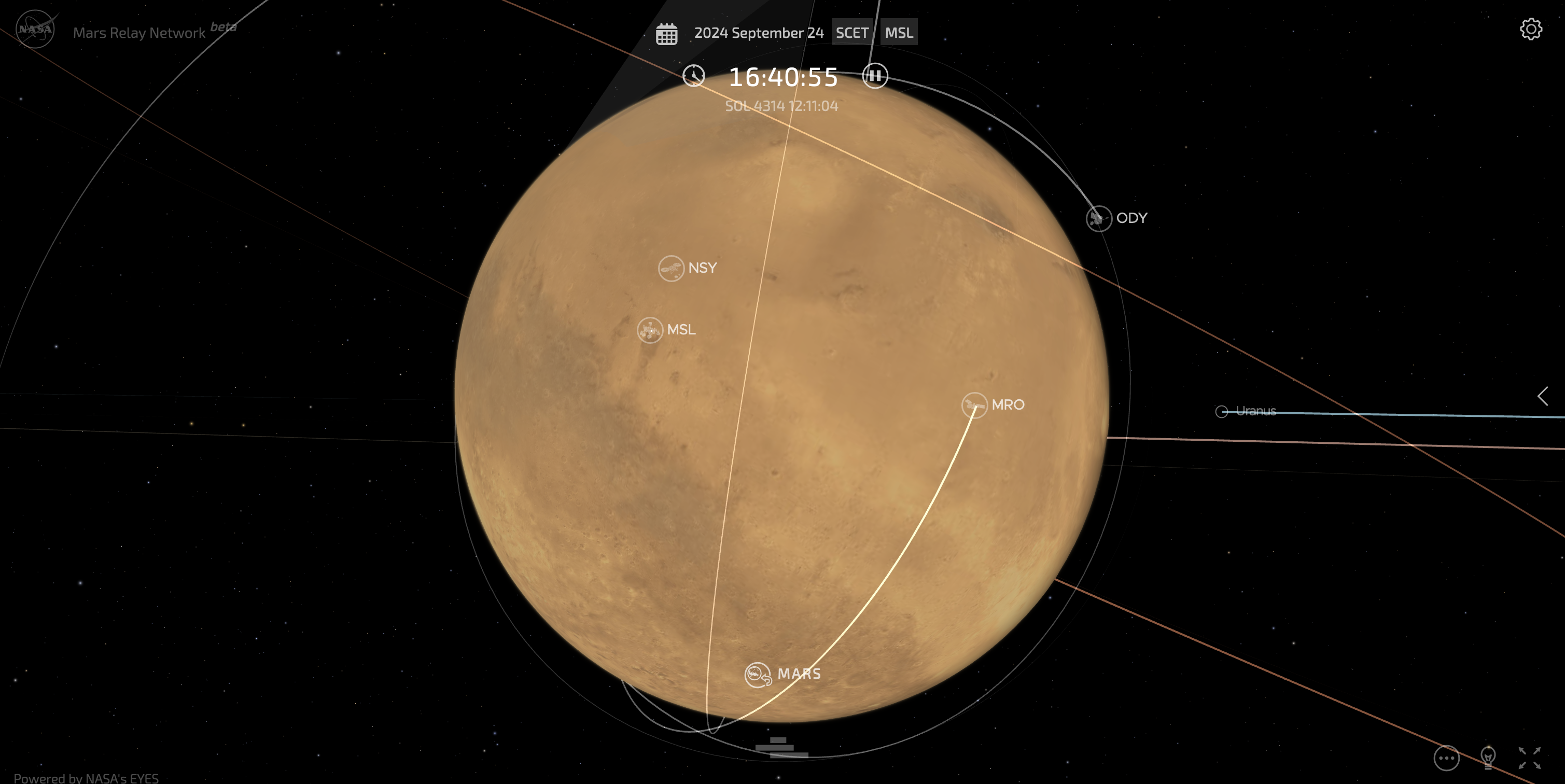
New images taken from space show how dust on and around InSight is changing over time — information that can help scientists learn more about the Red Planet. NASA’s Mars Reconnaissance Orbiter (MRO) caught a glimpse of the agency’s retired…

As NASA develops a blueprint for space exploration throughout the solar system for the benefit of humanity, the agency released several new documents Friday updating its Moon to Mars architecture. The roadmap sets NASA on course for long-term lunar exploration…

The road ahead will be even more scientifically intriguing, and probably somewhat easier-going, now that the six-wheeler has completed its long climb to the top. NASA’s Perseverance Mars rover has crested the top of Jezero Crater’s rim at a location…